Achieving Synchronized Motion of Multiple Robots Enduring Time Delay and Packet Loss for Cooperative Transportation
Overview
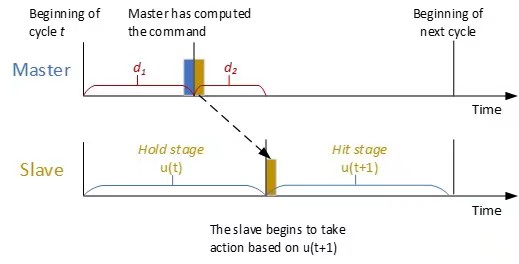
We introduce a "hold-and-hit" communication-control framework to synchronize robot movements in a manner that is robust against wireless network delays and packet loss. The hold-and-hit framework lays the groundwork for navigating multi-robot formations along complex curvilinear paths, particularly executable on microprocessor platforms such as Robotic Operating System (ROS) via wireless networks. Complementing hold-and-hit, we devise an optimization approach that enables the rigid formation to closely follow a desired curvilinear trajectory despite non-holonomic constraints-most robots are subject to non-holonomic constraints in that they do not have total freedom in tracking any path from point A to point B. In particular, our contributions consist of:
i. Under the hold-and-hit framework, we derives an upper bound of the control gain λ for unidimensional robot kinematic in terms of the packet loss rate p, converging the expectation of relative pose error between robots in a rigid formation.
ii. We reformulate the multi-robot rigid formation navigation as an intra-control-cycle constrained optimization problem, owing to the explicit evolution of relative pose error w.r.t control input from the discrete-time master-slave kinematic.
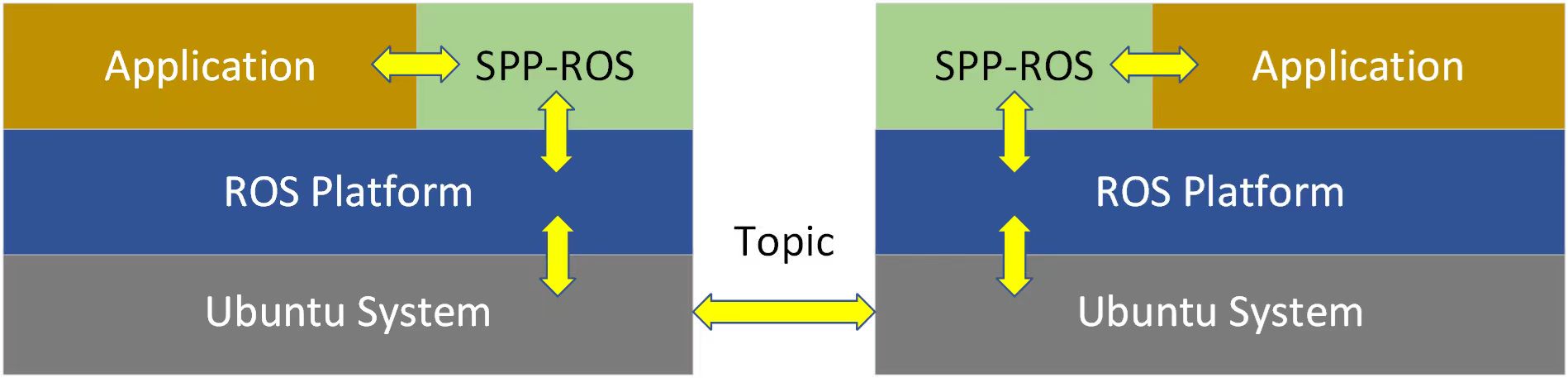
We implement the hold-and-hit framework as a middleware executable on ROS to facilitate the synchronous motion of multiple robots via wireless networks. The hold-and-hit middleware furnishes time synchronization and elastic delay compensation without intruding into robot applications. Simulations over a virtual environment demonstrate our method’s superiority in maintaining a 4-robot square formation on an S-shaped path benchmarked against two existing methods. In real physical experiments, the inter-distance error of robots is within ±0.06m and the inter-posture error is within ±10°, without divergence over 500 iterations.